Seeking the light
A long time ago
- in
fact in the days when the BBC micro was still the latest thing in
computer
technology - Fischer Technik produced a computerized buggy, which was
widely used in education. The little light seeker
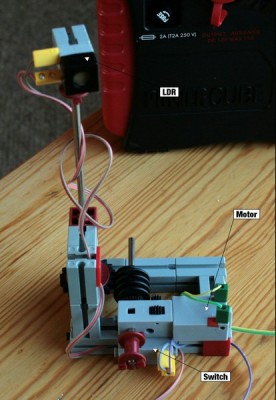
on the left was one of the projects suggested in the handbook. The
project uses a geared motor connected to a vertical spindle on which is
mounted a simple LDR.
There is also a micro switch mounted in such a way, that it is
activated twice for every turn of gear shaft. The activator is the
little red drum on the the same axle as the worm gear on the left.
This handy little addition enables the programmer to predict the
position of the motor. For instance, in my set-up, a complete
rotation of the shaft produces 40 pulses.
The motor is connected via my two-motor controller described elsewhere
in these pages
to the Velleman K8055 board. The switch is connected to digital
input 1 and the LDR is connected to analogue input 1. The
complete setup is shown below on the right.
 A word of warning here. The two internal potentiometers are still
connected to
the analogue inputs even when the internal link is disconnected. This
affects
the sensitivity of the ADC. My program allows you to monitor the
brightness of the surrounding. Adjust the top potentiometer for the
best reading.
A word of warning here. The two internal potentiometers are still
connected to
the analogue inputs even when the internal link is disconnected. This
affects
the sensitivity of the ADC. My program allows you to monitor the
brightness of the surrounding. Adjust the top potentiometer for the
best reading.
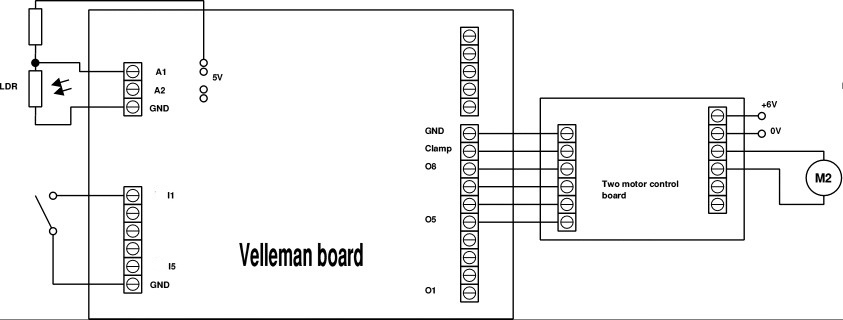
Below on the left is shown a sneaky way of getting the 5V supply for the LDR, which obviously has to be connected to the analogue input via a voltage divider. I took my supply from the five volt pins which supply the internal voltage for the analogue inputs.
On the right is the circuit diagram of the system.

The
program
The program allows you to point the LDR to any
convenient
point - i.e. the darkest point in the room. You do this by using the
keys 1,2 and 3 as left, right and stop. The number of pulses is
displayed as well as the amount of the LDR. This can vary from 0
(bright) to 255(dark). Adjust the little potentiometer for best results.
Pressing 'A' will switch to automatic. The LDR will
rotate full circle
whilst measuring the light level and counting the pulses from the
switch. It will then turn back and stop. It should now be pointing at
the brightest part of the room. This is not a continuous process, if
the light level changes nothing more will happen until you press 'A'
again.
Below is an archive with the program file and an executable, should you not own BB4W.
light_seeker_files.zip
Here
is a link to the YouTube video of the project
