A simple light follower
The circuit diagram of this project is very simple - consisting of two LDRs and two 3k resistors - seen on the right outside the dashed box. In order to understand what follows, I have included the input circuitry of one of the two ADC channels. Notice that the 100k potentiometer will always be in the circuit and hence allows us to adjust the input voltage to the circuit. Notice also the broken link to the internal 5V line and the tap diverting this voltage to the light sensing circuit.
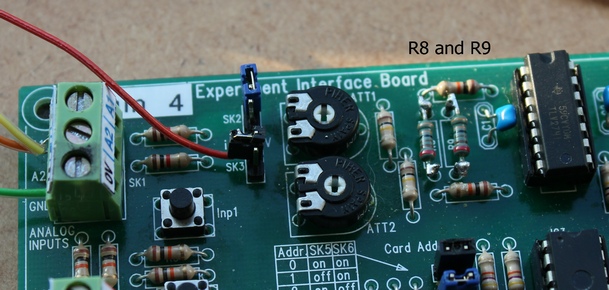 Furthermore
notice resistances R8 and R9. These two components
determine the gain
of the input stages and Velleman supply two values with their
kit.
It is vital that these resistors have the same value for both channels.
If they don't this project won't work, as I found out after a long
puzzled evening.
Furthermore
notice resistances R8 and R9. These two components
determine the gain
of the input stages and Velleman supply two values with their
kit.
It is vital that these resistors have the same value for both channels.
If they don't this project won't work, as I found out after a long
puzzled evening.
A word of warning here. The two internal potentiometers are still connected to the analogue inputs even when the internal link is disconnected. This affects the level of the ADC output. My program allows you to monitor the brightness of the surrounding. Adjust the top potentiometer for the best reading.
Also notice the red wire soldered to one side of a link connector and attached to one of the pins. This is a handy way of getting a 5V supply. But remember, this voltage comes from the USB port so treat the connection with respect - your computer is at the other end.
The project
On the right is my way of mounting the two LDRs. They need to point
away from each other at a small angle, because the program works by
turning the assembly in the direction of the sensor exposed to the
brighter light.
I used bits and pieces from a Fischertechnik kit but other arrangements will do the job just as well. Make sure that the leads connected to the sensor head are long enough to wrap around the axle a few times. My software does not allow for very short leads!
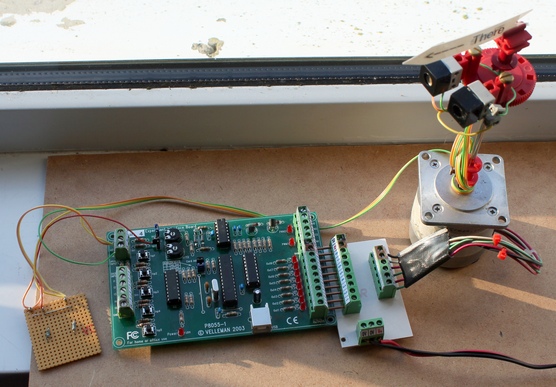 On
the left is the complete project. The above sensor assembly is directly
mounted to a stepper motor. The only other components needed are the
two resistors for the light detection voltage divider. I picked a value
of 3k, but this depends on the type of LDR used. The resistors are
mounted on the small Vero board.
On
the left is the complete project. The above sensor assembly is directly
mounted to a stepper motor. The only other components needed are the
two resistors for the light detection voltage divider. I picked a value
of 3k, but this depends on the type of LDR used. The resistors are
mounted on the small Vero board.
The outputs and the 0V line are connected to the ADC section of the
K8055 Velleman interface board. Take care that the left sensor is
connected to ADC1 and the right sensor to ADC2. If you get this
wrong, this project will turn out to be a light avoider, rather than a light follower!
The stepper motor is connected to the board via my higher current
interface explained elsewhere in these pages. If your motor uses little
current it can of course be connected directly. Additionally, my motor
has a step angle of only 1.8 degrees, which is much smaller than most
run-of-the-mill stepper motors can boast.
The
program
To help set up the system, the program gives various adjustment options. Pressing 'A' will display the output of both ADC channels side by side. This makes it easy to adjust the output levels of the two channels so that they are more or less the same. This is done by adjusting the two potentiometers on the K8055. Either one should not be larger than the other by more than 1 or 2.
Pressing 'L' will produce one complete turn of the motor and print the light values measured to the screen. If you see a lot of 0s or 255s then there is something wrong. Either you turned the potentiometers too far in either direction or you are in total darkness or you live under a bright tropical sun. Readjusting the pots should fix the problem.
Pressing 'Z' or 'C' will turn the motor either left or right. Use this option if you find that the lead has wrapped itself around the shaft several times and is running out of slack. Pressing 'S' will cause the program to perform one complete revolution and then reverse and point towards the brightest spot it has found. This duplicates my earlier light seeker project.
Finally comes the light follower option. After pressing 'F' and shining a moveable light towards the assembly, the motor should turn until it points towards that light. Moving the light left or right will make the motor turn in the same direction. This is done with the following few lines of basic:
REPEAT
640 SYS K8055_ReadAnalogChannel%,1 TO ADC1%
650 SYS K8055_ReadAnalogChannel%,2 TO ADC2%
660 IF ADC1%<ADC2%+3 AND ADC1%<ADC2%-3 THEN
670 Turn%-=1
680 Coil%-=1 :IF Coil%<1 Coil%=4
690 SYS K8055_WriteAllDigital%,FullStep%(Coil%)
700 Key$=INKEY$(0)
710 ENDIF
720 IF ADC2%<ADC1%-3 AND ADC2%<ADC1%+3 THEN
730 Turn%+=1
740 Coil%+=1 :IF Coil%>4 Coil%=1
750 SYS K8055_WriteAllDigital%,FullStep%(Coil%)
760 Key$=INKEY$(0)
770 ENDIF
Lines 640 and 650 read the two ADC channels and store their value in ADC1% and ADC2%. Line 660 finds out whether ADC1% is smaller than ADC2% - with s tolerance of +/- 3. If it is, line 690 will turn the motor by one full step.
Lines 720 to 750 do the same thing in the other direction. If you do this project and run into problems, drop me a line and I'll do my best to help.
