10 REM One-Step
20 REM Control one stepper motor with the Velleman K8055 interface board
30 REM Jochen Lueg
40 REM http://roevalley.com
50 REM Limavady, May 2012
60 REM Version 1.0
70
80 ON ERROR PROCerror
90 PROCK8055_init
100 PROCinit
110 ON CLOSE PROCclose
120 PROCwindow(680,300,"Two-step")
130 OFF
140 SYS K8055_CloseDevice%,0
150 SYS K8055_OpenDevice%,0
160
170 PRINT
180 PRINT " Left - Stop - Right . . . . . . Z X C"
190 PRINT " Full step mode . . . . . . F"
200 PRINT " Two-phase full step . . . . . . T"
210 PRINT " Half step mode . . . . . . H"
220 PRINT " Fast - - - Slow . . . . . . 1 - 9"
230 PRINT
240 PRINT " Quit the progran . . . . . . Q"
250
260 REM Main loop
270 REPEAT
280 Key$=INKEY$(0):REPEAT UNTIL INKEY(0)=-1
290 IF Key$ = "z" OR Key$ = "Z" Dir$="left" :PROCreport
300 IF Key$ = "c" OR Key$ = "C" Dir$="right" :PROCreport
310 IF Key$ = "x" OR Key$ = "X" Dir$="not at all" : SYS K8055_ClearAllDigital%:PROCreport
320 IF Key$ = "f" OR Key$ = "F" Mode$="FullStep" :PROCreport
330 IF Key$ = "h" OR Key$ = "H" Mode$="HalfStep" :PROCreport
340 IF Key$ = "t" OR Key$ = "T" Mode$="TwoPhase" :PROCreport
350 IF Key$="1" Speed%=10 :PROCreport
360 IF Key$="2" Speed%=20 :PROCreport
370 IF Key$="3" Speed%=40 :PROCreport
380 IF Key$="4" Speed%=75 :PROCreport
390 IF Key$="5" Speed%=150 :PROCreport
400 IF Key$="6" Speed%=300 :PROCreport
410 IF Key$="7" Speed%=600 :PROCreport
420 IF Key$="8" Speed%=1000 :PROCreport
430 IF Key$="9" Speed%=1400 :PROCreport
440 SYS "Sleep",Speed%
450 IF Dir$<>"not at all" PROCturn
460 UNTIL Key$ = "q" OR Key$ = "Q"
470 PROCclose
480 END
490
500
510
520 DEFPROCclose
530 SYS K8055_ClearAllDigital%
540 SYS K8055_CloseDevice%
550 SYS "FreeLibrary",K8055_Board%
560 QUIT
570 ENDPROC
580
590
600 DEFPROCreport
610 LOCAL S%
620 S%=Speed%
630 IF Dir$="not at all" S%=0
640 PRINTTAB(1,11)"The motor is in ";Mode$;" mode "
650 PRINT " and turnig ";Dir$;
660 IF Dir$<>"not at all" PRINT;" at speed ";S%;" "
670 IF Dir$="not at all"
PRINT;".
"
680 ENDPROC
690
700
710 DEFPROCturn
720 IF Mode$="FullStep" THEN
730 IF Dir$="right" Coil%+=1:IF Coil% > 4 Coil% = 1
740 IF Dir$="left" Coil%-=1:IF Coil% < 1 Coil% = 4
750 SYS K8055_WriteAllDigital%,Fullstep%(Coil%)
760 ENDIF
770
780 IF Mode$="TwoPhase" THEN
790 IF Dir$="right" Coil%+=1:IF Coil% > 4 Coil% = 1
800 IF Dir$="left" Coil%-=1:IF Coil% < 1 Coil% = 4
810 SYS K8055_WriteAllDigital%,Twophase%(Coil%)
820 ENDIF
830
840 IF Mode$="HalfStep" THEN
850 IF Dir$="right" Coil%+=1:IF Coil% > 8 Coil% = 1
860 IF Dir$="left" Coil%-=1:IF Coil% < 1 Coil% = 8
870 SYS K8055_WriteAllDigital%,Halfstep%(Coil%)
880 ENDIF
890
900 ENDPROC
910
920
930 DEFPROCinit
940 Dir$="not at all"
950 Mode$="FullStep"
960 Speed%=2
970 Coil%=1
980
990 DIM Fullstep%(4)
1000 Fullstep%(1) = %0001 <<4
1010 Fullstep%(2) = %0010 <<4
1020 Fullstep%(3) = %0100 <<4
1030 Fullstep%(4) = %1000 <<4
1040
1050 DIM Twophase%(4)
1060 Twophase%(1) = %0011 <<4
1070 Twophase%(2) = %0110 <<4
1080 Twophase%(3) = %1100 <<4
1090 Twophase%(4) = %1001 <<4
1100
1110 DIM Halfstep%(8)
1120 Halfstep%(1) = %0001 <<4
1130 Halfstep%(2) = %0011 <<4
1140 Halfstep%(3) = %0010 <<4
1150 Halfstep%(4) = %0110 <<4
1160 Halfstep%(5) = %0100 <<4
1170 Halfstep%(6) = %1100 <<4
1180 Halfstep%(7) = %1000 <<4
1190 Halfstep%(8) = %1001 <<4
1200
1210 SYS K8055_WriteAllDigital%,0
1220 ENDPROC
1230
1240
1250 DEFPROCwindow(WindowWidth%,WindowHeight%,W$)
1260 MODE 30
1270 SYS "SetWindowPos",@hwnd%,0,0,0,WindowWidth%,WindowHeight%,6
1280 SYS "SetWindowText",@hwnd%,W$
1290 VDU 26
1300 COLOUR 15
1310 *FONT Lucida Console,14,2
1320 ENDPROC
1330
1340
1350 DEFPROCerror
1360 PRINT REPORT$;" at line ";ERL
1370 SYS K8055_ClearAllDigital%
1380 SYS K8055_ClearAllAnalog%
1390 SYS K8055_CloseDevice%
1400 SYS "FreeLibrary",K8055_Board%
1410 END
1420 ENDPROC
1430
1440
1450 DEFPROCK8055_init
1460 SYS"LoadLibrary","K8055D.dll" TO K8055_Board%
1470 SYS"GetProcAddress",K8055_Board%,"OpenDevice" TO K8055_OpenDevice%
1480 SYS"GetProcAddress",K8055_Board%,"CloseDevice" TO K8055_CloseDevice%
1490 SYS"GetProcAddress",K8055_Board%,"ReadAnalogChannel" TO K8055_ReadAnalogChannel%
1500 SYS"GetProcAddress",K8055_Board%,"ReadAllAnalog" TO K8055_ReadAllAnalog%
1510 SYS"GetProcAddress",K8055_Board%,"OutputAnalogChannel" TO K8055_OutputAnalogChannel%
1520 SYS"GetProcAddress",K8055_Board%,"OutputAllAnalog" TO K8055_OutputAllAnalog%
1530 SYS"GetProcAddress",K8055_Board%,"ClearAnalogChannel" TO K8055_ClearAnalogChannel%
1540 SYS"GetProcAddress",K8055_Board%,"ClearAllAnalog" TO K8055_ClearAllAnalog%
1550 SYS"GetProcAddress",K8055_Board%,"SetAnalogChannel" TO K8055_SetAnalogChannel%
1560 SYS"GetProcAddress",K8055_Board%,"SetAllAnalog" TO K8055_SetAllAnalog%
1570 SYS"GetProcAddress",K8055_Board%,"WriteAllDigital" TO K8055_WriteAllDigital%
1580 SYS"GetProcAddress",K8055_Board%,"ClearDigitalChannel" TO K8055_ClearDigitalChannel%
1590 SYS"GetProcAddress",K8055_Board%,"ClearAllDigital" TO K8055_ClearAllDigital%
1600 SYS"GetProcAddress",K8055_Board%,"SetDigitalChannel" TO K8055_SetDigitalChannel%
1610 SYS"GetProcAddress",K8055_Board%,"SetAllDigital" TO K8055_SetAllDigital%
1620 SYS"GetProcAddress",K8055_Board%,"ReadDigitalChannel" TO K8055_ReadDigitalChannel%
1630 SYS"GetProcAddress",K8055_Board%,"ReadAllDigital" TO K8055_ReadAllDigital%
1640 SYS"GetProcAddress",K8055_Board%,"ResetCounter" TO K8055_ResetCounter%
1650 SYS"GetProcAddress",K8055_Board%,"ReadCounter" TO K8055_ReadCounter%
1660 SYS"GetProcAddress",K8055_Board%,"SedtCounterDebouceTime" TO K8055_SetCounterDebounceTime%
1670
1680
1690 ENDPROC
1700
|
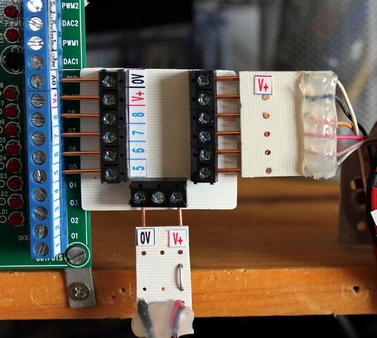 This simple little project requires only a small adaptor to make it more
convenient to connect the stepper motor to the Velleman board. As can be
seen from the illustration on the left and the circuit diagram below,
the motor is connected via 6 wires seen on the right of the picture. The
two common wires of the motor coils are at the top and they connect to
the positive supply seen on the bottom and the clamp input of the
Velleman board. The four motor wires are then connected to outputs O5 to
O8.
This simple little project requires only a small adaptor to make it more
convenient to connect the stepper motor to the Velleman board. As can be
seen from the illustration on the left and the circuit diagram below,
the motor is connected via 6 wires seen on the right of the picture. The
two common wires of the motor coils are at the top and they connect to
the positive supply seen on the bottom and the clamp input of the
Velleman board. The four motor wires are then connected to outputs O5 to
O8. 
 To determine the correct sequence of wires simply connect the two
commons to one side of the battery and any one of the other four wires
to the other side. You have a three in four chance that the motor will
move by a single step either left or right. If this doesn't happen, try
another wire.
To determine the correct sequence of wires simply connect the two
commons to one side of the battery and any one of the other four wires
to the other side. You have a three in four chance that the motor will
move by a single step either left or right. If this doesn't happen, try
another wire.