10 REM StepCon
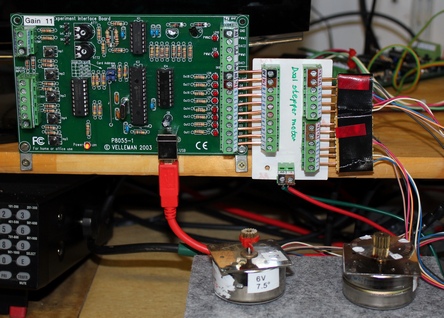
20 REM Control two stepper motors
30 REM Speed is the same for both motors
40 REM Jochen Lueg
50 REM http://roevalley.com
60 REM Limavady, February 2012
70 REM Version 3
80
90 ON ERROR PRINT REPORT$;" at line ";ERL
100 PROCK8055_init
110 PROCinit
120 COLOUR 128
130 CLS
140 COLOUR 15
150 SYS K8055_CloseDevice%,0
160 SYS K8055_OpenDevice%,0
170
180 PRINT
190 PRINT " Motor 1"
200 PRINT " Left - Stop - Right . . . . . . Z X C"
210 PRINT
220 PRINT " Motor 2"
230 PRINT " Left - Stop - Right . . . . . . < > ?"
240 PRINT
250 PRINT " Fast - - - Slow . . . . . . 1 2 3 4 5"
260 PRINT " Quit the progran . . . . . . Q"
270 REM Main loop
280 REPEAT
290 Key$=INKEY$(Speed%):REPEAT UNTIL INKEY(0)=-1
300 IF Key$ = "z" OR Key$ = "Z" M1$="left"
310 IF Key$ = "c" OR Key$ = "C" M1$="right"
320 IF Key$ = "x" OR Key$ = "X" THEN
330 M1$="stop"
340 Pattern%=Pattern% AND %11110000
350 SYS K8055_WriteAllDigital%,Pattern%
360 ENDIF
370 IF Key$ = "," OR Key$ = "<" M2$="left"
380 IF Key$ = "/" OR Key$ = "?" M2$="right"
390 IF Key$ = "." OR Key$ = ">" THEN
400 M2$="stop"
410 Pattern%=Pattern% AND %00001111
420 SYS K8055_WriteAllDigital%,Pattern%
430 ENDIF
440 IF Key$="1" Speed%=0
450 IF Key$="2" Speed%=1
460 IF Key$="3" Speed%=5
470 IF Key$="4" Speed%=15
480 IF Key$="5" Speed%=25
490 IF M1$<>"stop" OR M2$<>"stop" PROCturn
500 IF M1$="stop" AND M2$="stop" SYS K8055_ClearAllDigital%
510 UNTIL Key$ = "q" OR Key$ = "Q"
520
530 SYS K8055_ClearAllDigital%
540 SYS K8055_CloseDevice%
550 *QUIT
560 END
570
580
590 DEFPROCturn
600 REM M1 right
610 IF M1$="right" Coil1%+=1:IF Coil1% > 4 Coil1% = 1
620 IF M1$="left" Coil1%-=1:IF Coil1% < 1 Coil1% = 4
630 IF M2$="right" Coil2%+=1:IF Coil2% > 4 Coil2% = 1
640 IF M2$="left" Coil2%-=1:IF Coil2% < 1 Coil2% = 4
650 Pattern%=M1Full%(Coil1%) OR M2Full%(Coil2%)
660 SYS K8055_WriteAllDigital%,Pattern%
670 REMTIME=0:REPEAT UNTIL TIME>Speed%
680 ENDPROC
690
700
|
710
720 DEFPROCinit
730 M1$="stop" :M2$="stop"
740 Mode$="FullStep"
750 Speed%=0
760 Coil1%=1
770 Coil2%=1
780 Pattern%=0
790 DIM M1Full%(4)
800 M1Full%(1) = %00000001
810 M1Full%(2) = %00000010
820 M1Full%(3) = %00000100
830 M1Full%(4) = %00001000
840
850 DIM M2Full%(4)
860 M2Full%(1) = %00010000
870 M2Full%(2) = %00100000
880 M2Full%(3) = %01000000
890 M2Full%(4) = %10000000
900
1100
1110 REM Make sure the motors are in sequence
1120 FOR J%=1 TO 4
1130 Pattern%=(M1Full%(J%) OR M2Full%(J%))
1140 SYS K8055_WriteAllDigital%,Pattern%
1150 NEXT
1160 SYS K8055_WriteAllDigital%,0
1170 ENDPROC
1180
1190
1200
1210 DEFPROCK8055_init
1220 REM Typing errors in routine name do not generate an error message - they just hang up the program.
1230 REM These are all the system calls in the order found in the manual
1240 SYS"LoadLibrary","K8055D.dll" TO K8055_Board%
1250 SYS"GetProcAddress",K8055_Board%,"OpenDevice" TO K8055_OpenDevice%
1260 SYS"GetProcAddress",K8055_Board%,"CloseDevice" TO K8055_CloseDevice%
1270 SYS"GetProcAddress",K8055_Board%,"ReadAnalogChannel" TO K8055_ReadAnalogChannel%
1280 SYS"GetProcAddress",K8055_Board%,"ReadAllAnalog" TO K8055_ReadAllAnalog%
1290 SYS"GetProcAddress",K8055_Board%,"OutputAnalogChannel" TO K8055_OutputAnalogChannel%
1300 SYS"GetProcAddress",K8055_Board%,"OutputAllAnalog" TO K8055_OutputAllAnalog%
1310 SYS"GetProcAddress",K8055_Board%,"ClearAnalogChannel" TO K8055_ClearAnalogChannel%
1320 SYS"GetProcAddress",K8055_Board%,"ClearAllAnalog" TO K8055_ClearAllAnalog
1330 SYS"GetProcAddress",K8055_Board%,"SetAnalogChannel" TO K8055_SetAnalogChannel%
1340 SYS"GetProcAddress",K8055_Board%,"SetAllAnalog" TO K8055_SetAllAnalog%
1350 SYS"GetProcAddress",K8055_Board%,"WriteAllDigital" TO K8055_WriteAllDigital%
1360 SYS"GetProcAddress",K8055_Board%,"ClearDigitalChannel" TO K8055_ClearDigitalChannel%
1370 SYS"GetProcAddress",K8055_Board%,"ClearAllDigital" TO K8055_ClearAllDigital%
1380 SYS"GetProcAddress",K8055_Board%,"SetDigitalChannel" TO K8055_SetDigitalChannel%
1390 SYS"GetProcAddress",K8055_Board%,"SetAllDigital" TO K8055_SetAllDigital%
1400 SYS"GetProcAddress",K8055_Board%,"ReadDigitalChannel" TO K8055_ReadDigitalChannel%
1410 SYS"GetProcAddress",K8055_Board%,"ReadAllDigital" TO K8055_ReadAllDigital%
1420 SYS"GetProcAddress",K8055_Board%,"ResetCounter" TO K8055_ResetCounter%
1430 SYS"GetProcAddress",K8055_Board%,"ReadCounter" TO K8055_ReadCounter%
1440 SYS"GetProcAddress",K8055_Board%,"SedtCounterDebouceTime" TO K8055_SetCounterDebounceTime%
1450 ENDPROC
|